ROB 530: Mobile Robotics W24 Project
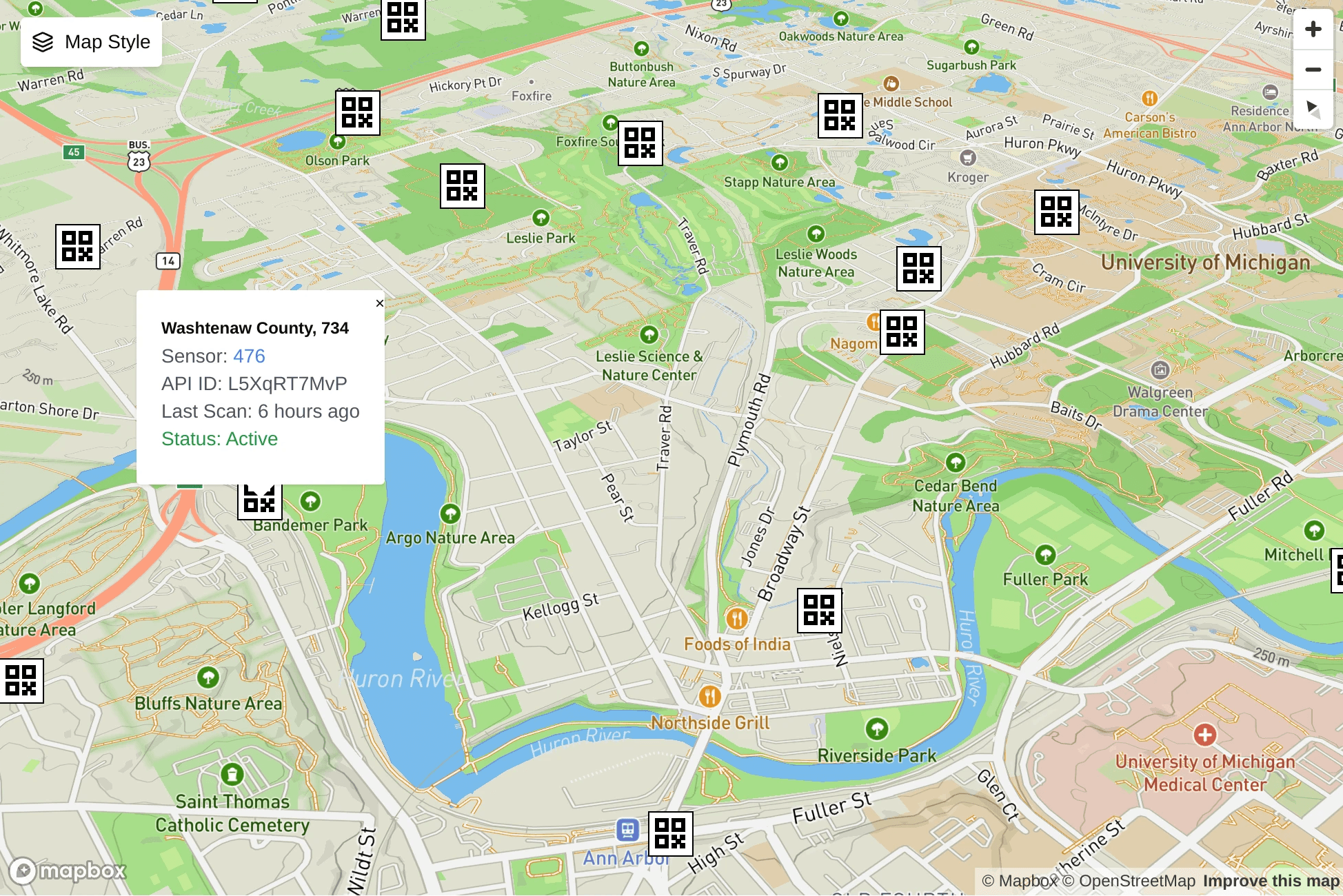
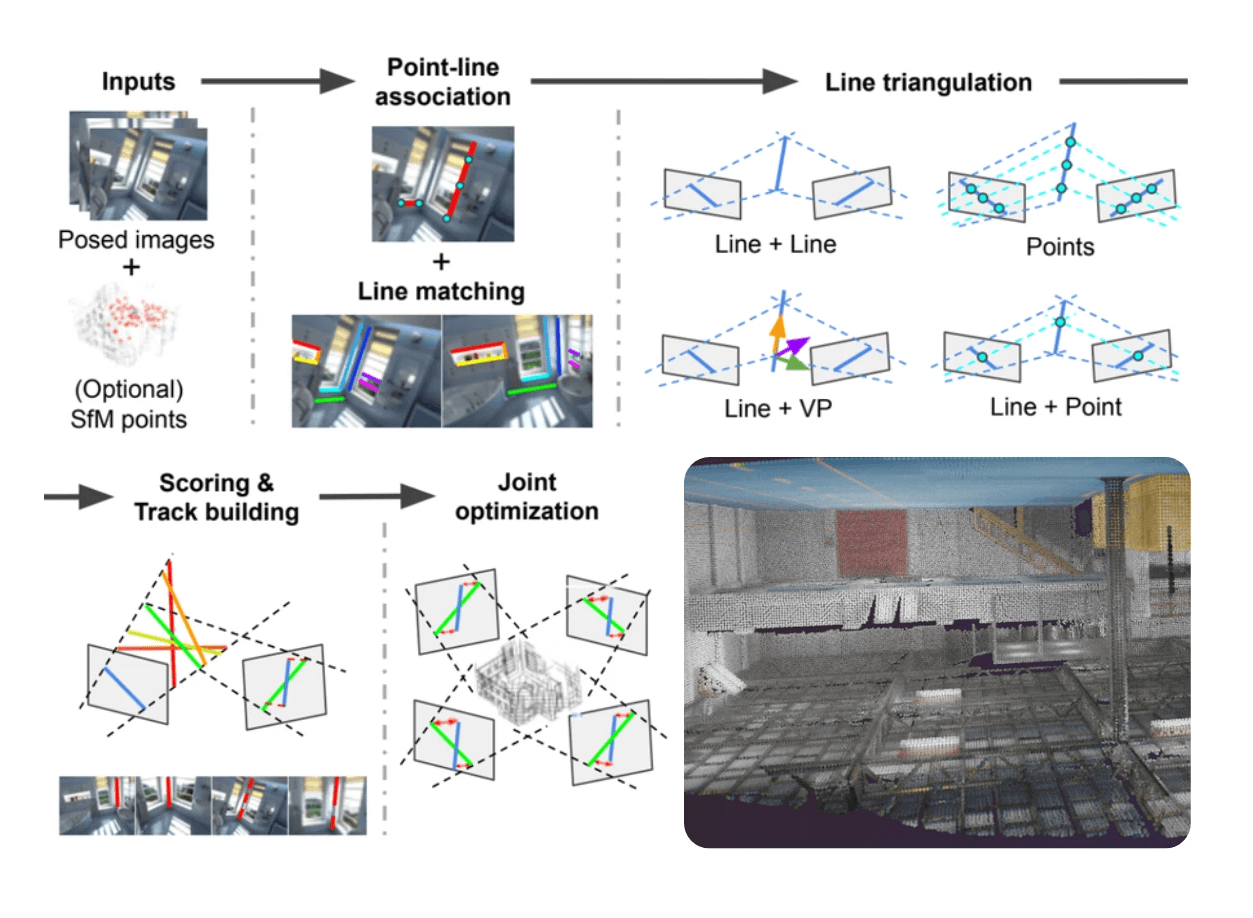
Example - Car Factory
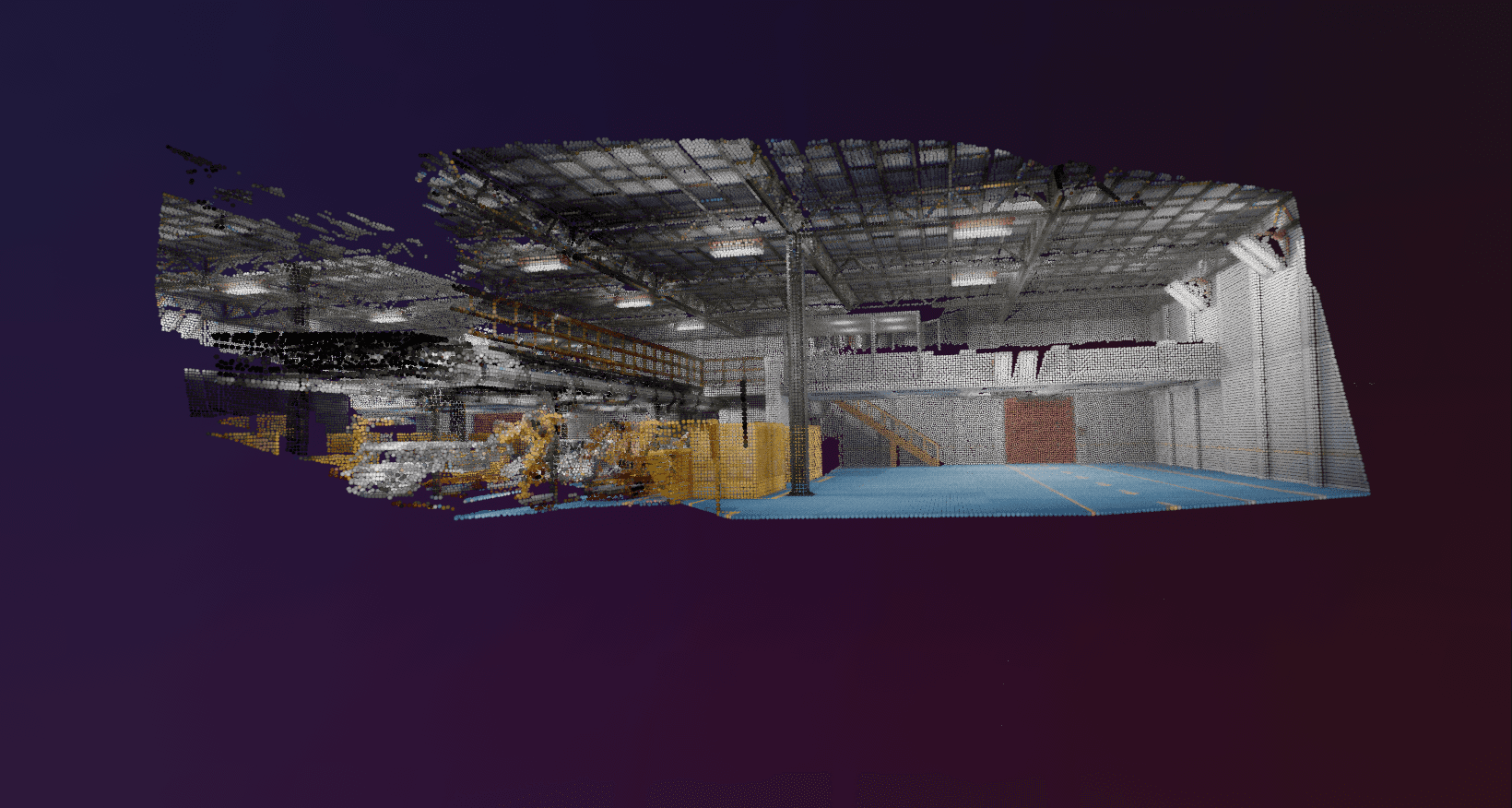
Alt Text: Image showcasing example car factory model used in project
Installation
Cloning the Repository
This repository includes multiple nested Git submodules. Use the following steps to clone it properly:
Installation via pipenv
This method was tested on:
Ubuntu 20.04
CMake version 3.17
🛠 Via Installation Script
We’ve created an installation script to automate setup. It does the following:
Verifies your CMake version is compatible
Recursively updates submodules
Locates
colmapandPoseLibvia CMakeChecks for required
aptdependencies (does not install them)Installs
asdffor managing Python versionsInstalls
pipenvfor environment managementSets up Python 3.9 and all necessary Python dependencies
Installs
LIMapOverrides a file in a third-party directory to ensure compatibility
Note: This is needed because LIMap does not pin Hierarchical-Localization version, which introduced changes like pathlib.Path.
🛠 Manual Install
Follow LIMap installation instructions (up to Python deps step, excluding OpenCV).
Ensure your CMake is version 3.17 or above (prepend to
PATH).Install pipenv:
Create a pipenv environment:
Install PyTorch & Torchvision:
Install LIMap dependencies:
Install LIMap itself:
If a third-party package is not found:
Installation via Anaconda
Create a new Conda environment:
Follow the steps in Via Installation Script, adjusting the CUDA version if needed (e.g., use 11.8 if you're on 12).
Install the package:
Verify installation:
Setup
📝 Files for the above example are located in the repository.
📦 TODO: Add downloader script for small (~100 image) dataset from Google Drive.