Humanoid Bipedal Locomotion and AI Control on Unitree G1
Humanoid Bipedal Locomotion and AI Control on Unitree G1
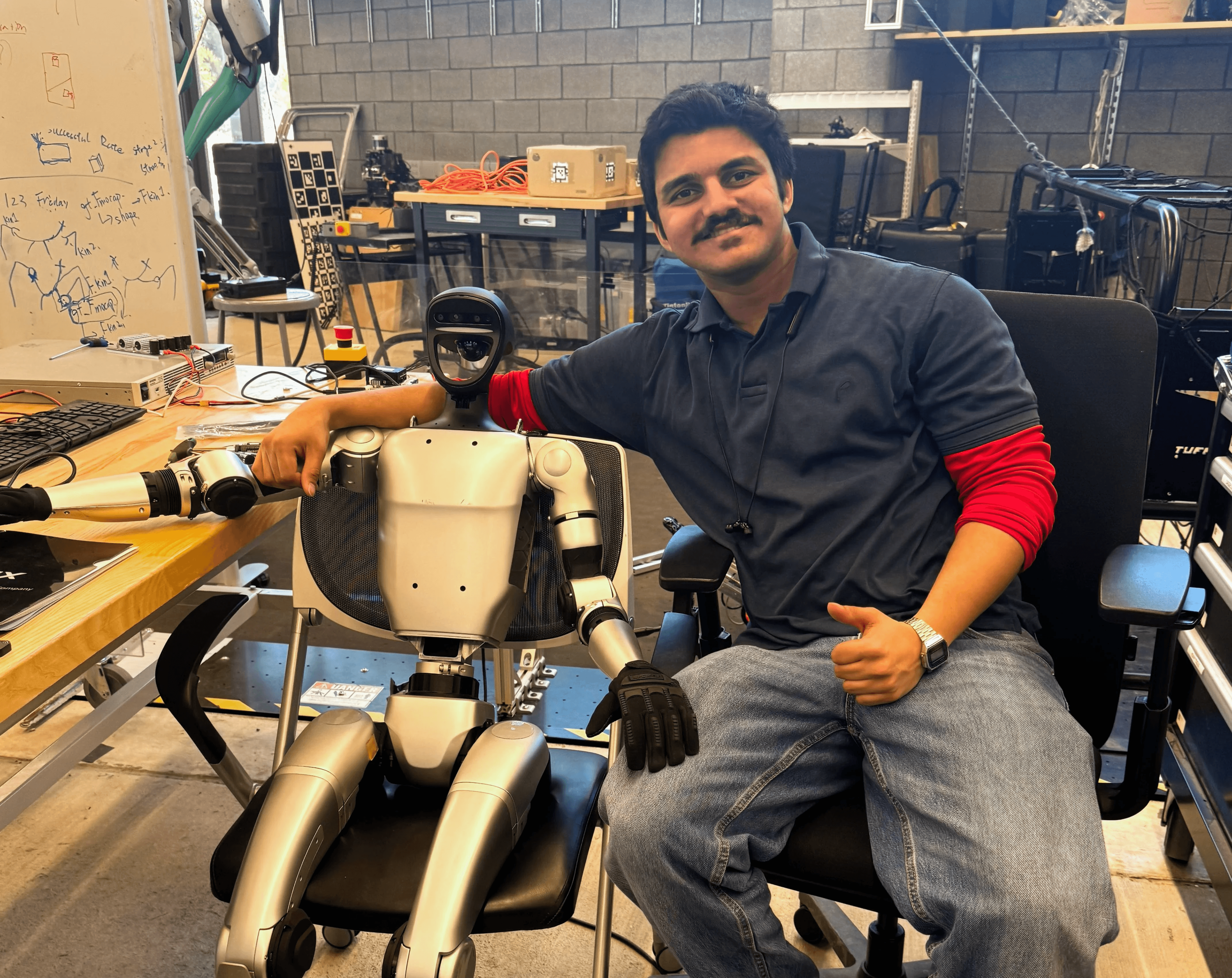
I'm exploring bipedal locomotion on the Unitree G1 humanoid robot. Using NVIDIA Isaac Sim for policy testing, I'm trying to integrate AI-driven control mechanisms, reinforcement learning, and model-based optimization to enhance gait stability and adaptability to uneven terrain. This research contributes to humanoid robotics, with applications in assistive robotics, search and rescue, and autonomous mobility.
I'm exploring bipedal locomotion on the Unitree G1 humanoid robot. Using NVIDIA Isaac Sim for policy testing, I'm trying to integrate AI-driven control mechanisms, reinforcement learning, and model-based optimization to enhance gait stability and adaptability to uneven terrain. This research contributes to humanoid robotics, with applications in assistive robotics, search and rescue, and autonomous mobility.
Category
May 15, 2024
Independent Research
Independent Research
Services
May 15, 2024
Humanoids
Humanoids
Client
May 15, 2024
UM Robotics
UM Robotics
Year
May 15, 2024
Jan 2025 – Present
Jan 2025 – Present
This project is top secret — can’t spill the beans here… hehe 😏
But if you’re genuinely curious about what I’m cooking up with humanoids, feel free to shoot me an email!
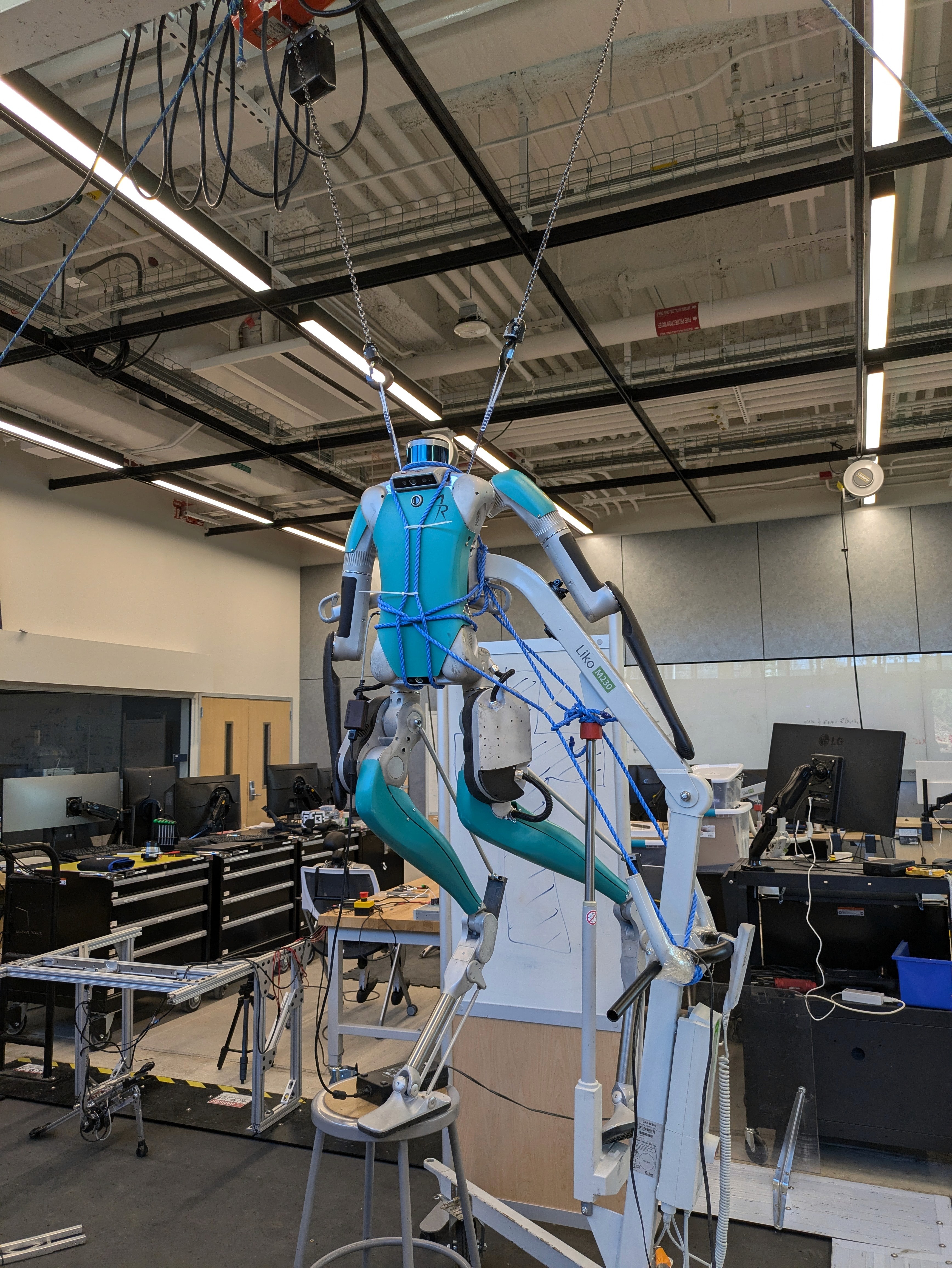
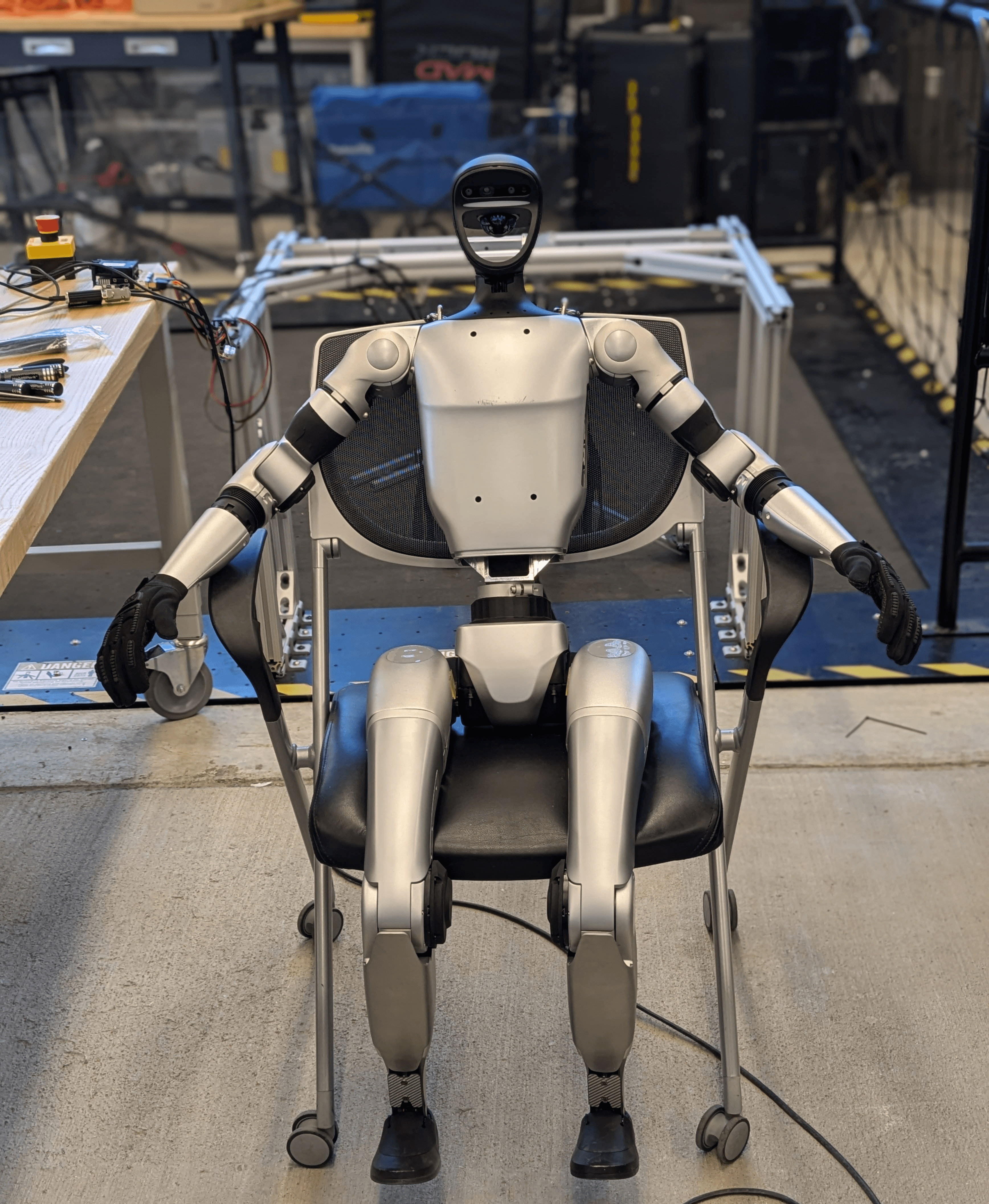
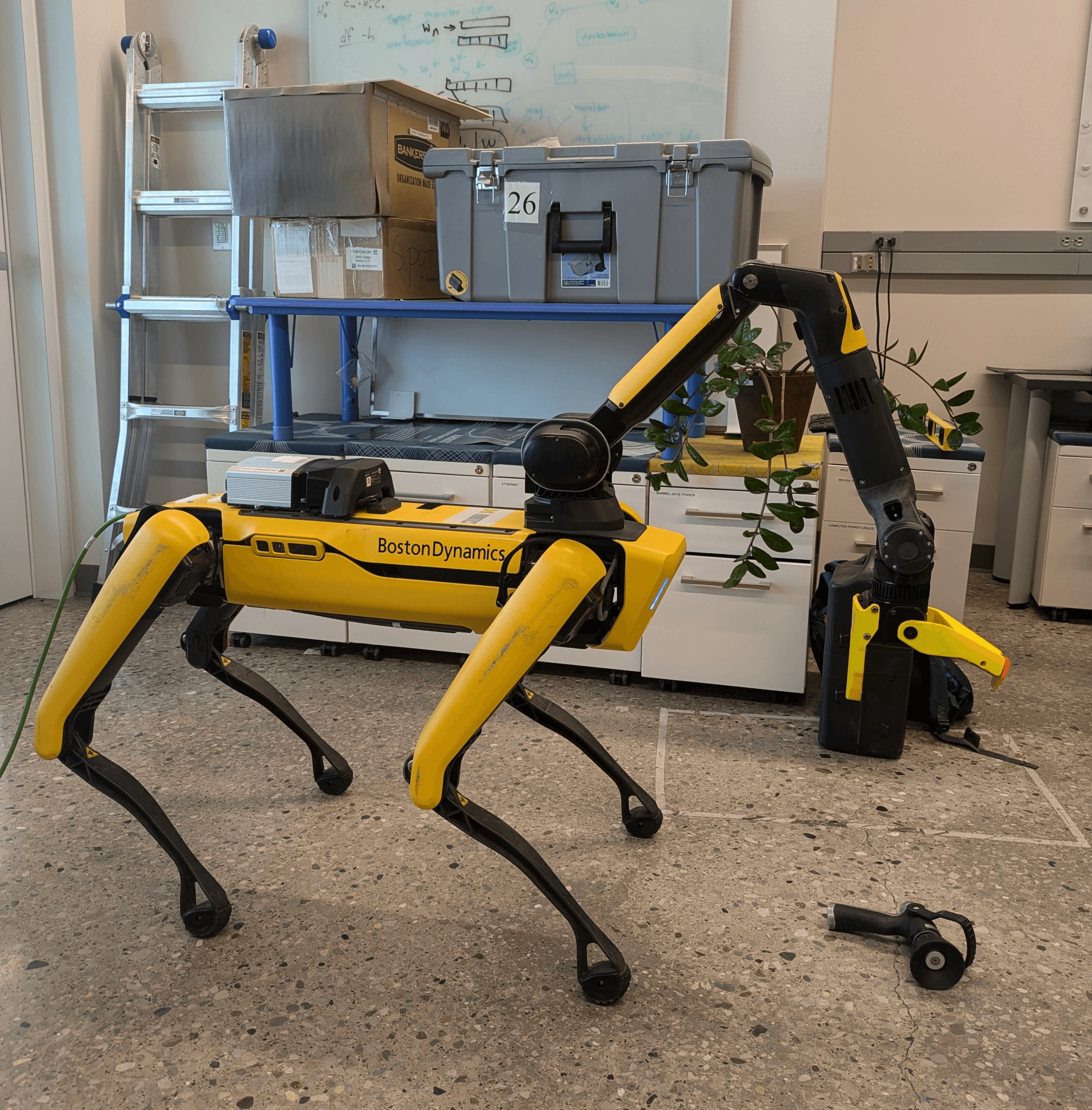
Here's some more robotic eye candy.